- · 《中华关节外科杂志》期[06/01]
- · 《中华关节外科杂志》投[06/01]
- · 中华关节外科杂志版面费[06/01]
一、来稿必须是作者独立取得的原创性学术研究成果,来稿的文字复制比(相似度或重复率)必须低于用稿标准,引用部分文字的要在参考文献中注明;署名和作者单位无误,未曾以任何形式用任何文种在国内外公开发表过;未一稿多投。 二、来稿除文中特别加以标注和致谢之外,不侵犯任何版权或损害第三方的任何其他权利。如果20天后未收到本刊的录用通知,可自行处理(双方另有约定的除外)。 三、来稿经审阅通过,编辑部会将修改意见反馈给您,您应在收到通知7天内提交修改稿。作者享有引用和复制该文的权利及著作权法的其它权利。 四、一般来说,4500字(电脑WORD统计,图表另计)以下的文章,不能说清问题,很难保证学术质量,本刊恕不受理。 五、论文格式及要素:标题、作者、工作单位全称(院系处室)、摘要、关键词、正文、注释、参考文献(遵从国家标准:GB\T7714-2005,点击查看参考文献格式示例)、作者简介(100字内)、联系方式(通信地址、邮编、电话、电子信箱)。 六、处理流程:(1) 通过电子邮件将稿件发到我刊唯一投稿信箱(2)我刊初审周期为2-3个工作日,请在投稿3天后查看您的邮箱,收阅我们的审稿回复或用稿通知;若30天内没有收到我们的回复,稿件可自行处理。(3)按用稿通知上的要求办理相关手续后,稿件将进入出版程序。(4) 杂志出刊后,我们会按照您提供的地址免费奉寄样刊。 七、凡向文教资料杂志社投稿者均被视为接受如下声明:(1)稿件必须是作者本人独立完成的,属原创作品(包括翻译),杜绝抄袭行为,严禁学术腐败现象,严格学术不端检测,如发现系抄袭作品并由此引起的一切责任均由作者本人承担,本刊不承担任何民事连带责任。(2)本刊发表的所有文章,除另有说明外,只代表作者本人的观点,不代表本刊观点。由此引发的任何纠纷和争议本刊不受任何牵连。(3)本刊拥有自主编辑权,但仅限于不违背作者原意的技术性调整。如必须进行重大改动的,编辑部有义务告知作者,或由作者授权编辑修改,或提出意见由作者自己修改。(4)作品在《文教资料》发表后,作者同意其电子版同时发布在文教资料杂志社官方网上。(5)作者同意将其拥有的对其论文的汇编权、翻译权、印刷版和电子版的复制权、网络传播权、发行权等权利在世界范围内无限期转让给《文教资料》杂志社。本刊在与国内外文献数据库或检索系统进行交流合作时,不再征询作者意见,并且不再支付稿酬。 九、特别欢迎用电子文档投稿,或邮寄编辑部,勿邮寄私人,以免延误稿件处理时间。
Science杂志年度十大机器人公布!
作者:网站采编关键词:
摘要:【编者按】了解周围人的看法机器人、交互与期待、情境感知机器人的发展,产生独特的行为和个性,是社交机器人最受关注的话题。 Science 杂志的年度机器人评选为机器人制造商提供
【编者按】了解周围人的看法机器人、交互与期待、情境感知机器人的发展,产生独特的行为和个性,是社交机器人最受关注的话题。 Science 杂志的年度机器人评选为机器人制造商提供了参考指南。
最近,《科学》杂志评选出了 10 项激动人心的机器人开发和技术,涵盖了从可能改变机器人技术未来的原始研究到支持基础科学和促进工业和医疗创新的商业产品的方方面面。
前 1:波士顿动力跑酷机器人 Atlas
1.5 米,75公斤的Atlas的表现让我们惊喜,只用一条腿跳过木踏板,同时慢跑和跳过木箱没有间断。 ?
这些功能用于在具有挑战性的地形上行走、在受到干扰时保持平衡、站立、抬起和操纵物体,以及像体操运动员一样进行后空翻。
Marc Raibert 的波士顿动力团队仍然是机器人平衡和推进方面的领导者。
Raibert 观察到“机械系统有自己的想法,受物理结构和物理定律支配。” Atlas 使用其视觉系统进行自我调整并测量与跑酷障碍物的距离。
虽然Raibert承认并不是所有的实验都能成功掌握,但他希望这些演示能给“机器人未来能做什么”这个问题带来一些启发。
Top 2:Da Vinci SP 平台 Intuitive Surgical
Robotic外科手术是近年来最重要的外科创新之一。
通过使用机器人方法进行根治性前列腺切除术等手术,这意味着很多好处。 ?
越来越多的机器人平台正在涌现,临床吸收的增加取决于成本效益和更广泛的临床准入障碍等问题是否得到解决。 ?
达芬奇是早期开拓者和全球市场领导者。 Intuitive Surgical 继续推动手术机器人的发展。 ?
通过一个2.5厘米的插管和一个小切口,新推出的达芬奇单端口系统让外科医生可以控制三个完全萎缩的肘部器械,结合关节进行深部病变内窥镜。
前 3 名:软机器人在成长中导航
通过提示导航的发展为机器人开辟了新的方向。 ?
想象一下,如果我们可以利用葡萄藤、神经元或真菌菌丝的生长方式来扩大、加速并获得极高的机动性。 ?
研究人员使用了一根柔软的材料管,它可以在内部折叠,但是当加压时,它会随着管子前部的材料被向外推而向外生长。 ?
这个杰出的设计概念解决了机器人技术中的几个主要挑战,并通过提取一般生物学原理来举例说明生物学启发设计的使用。
软机器人的设计允许在复杂的非结构化环境中避开障碍物,有望在管道和导管、医疗设备以及探索和搜救机器人中导航。
Top 4:用于软体机器人的 3D 打印液晶弹性体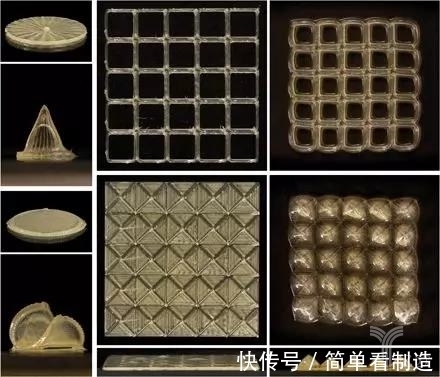
之前已经使用了多种变形的液晶弹性体致动器,但是这个项目展示了如何使用高工作温度和空间编程的向列序列,直接墨水写入3D打印来制造弹性体。 ?
与目前报道的其他液晶弹性体相比,这些致动器显示出增加重量的能力。
该技术有望为软机器人提供大面积设计和动态功能架构。
Top 5:肌肉模拟、自我修复和液压放大执行器
执行器使用静电和液压原理在施加电压时提供线性收缩,无需预拉伸材料或任何刚性框架。 ?
HASEL(Hydraulic Amplified Self-healing Electrostatic)执行器功能强大,用途广泛,但生产成本低。
据作者说,他们只使用廉价的热封方法和廉价的商业材料来生产这种有前途的技术。 ?
值得注意的是,该执行器可以将其重量提升200次以上。
前 6 名:DNA 自组装纳米级机器人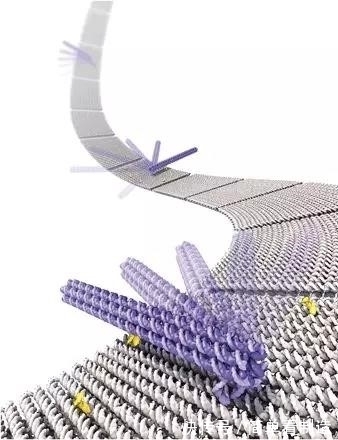
DNA 折叠可以在纳米尺度上形成不同的形状。 ?
通过控制自组装DNA折叠结构,结合单链DNA形成的闩锁系统,现在可以在外部施加的可调电场下进行精确的纳米级运动。 ?
这些纳米级机器人系统可以并联使用,用于分子或纳米粒子的电驱动传输,数十纳米或更多。 ?
机器人可以自下而上进行可编程合成和材料组装。其定位状态也可作为分子机械记忆。
文章来源:《中华关节外科杂志》 网址: http://www.zhgjwkzzzz.cn/zonghexinwen/2021/0814/447.html
中华关节外科杂志投稿 | 中华关节外科杂志编辑部| 中华关节外科杂志版面费 | 中华关节外科杂志论文发表 | 中华关节外科杂志最新目录
Copyright © 2021 《中华关节外科杂志》杂志社 版权所有 Power by DedeCms
投稿电话: 投稿邮箱: